世界初のワークダイレクト搬送を実現
段取り不要のバイス自動化システム R-C2
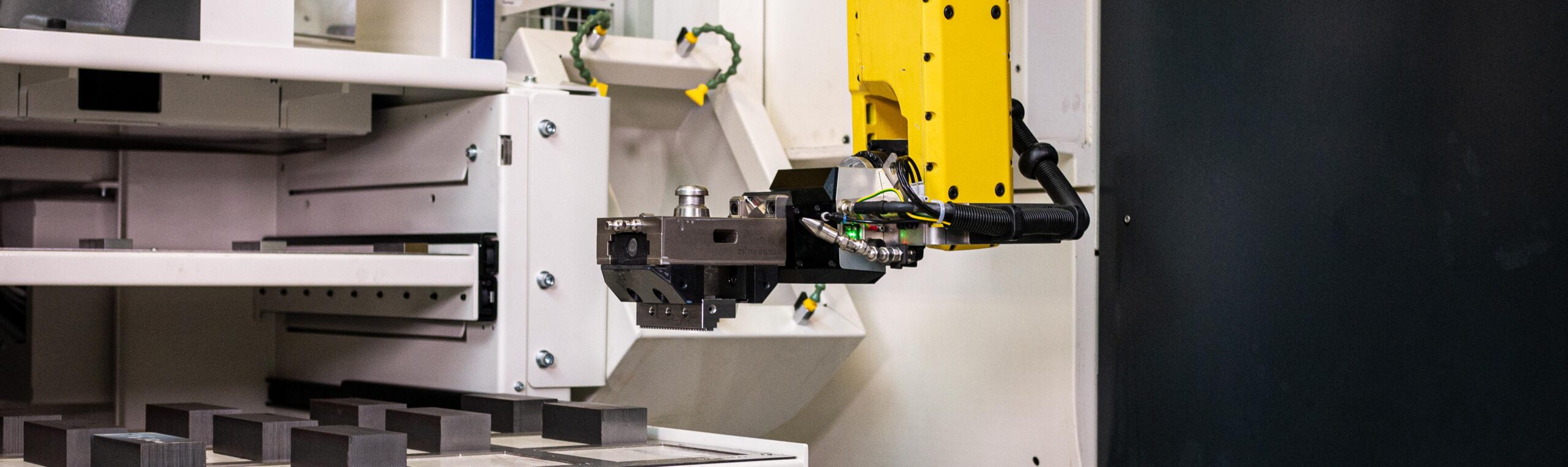
SCHUNKのワークピースオートメーションR-C2は、ワークの投入・取り出し、また二次加工までも自動化し、
さらに段取り時間の短縮も実現する画期的なシステムです。
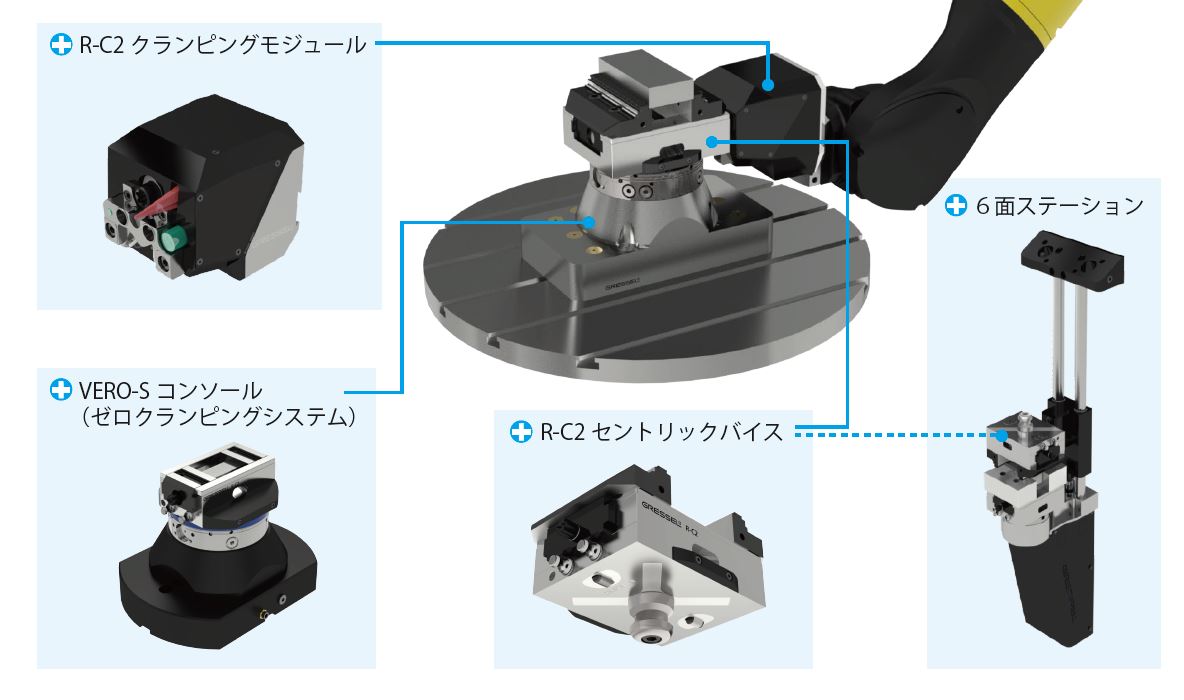
システム構成
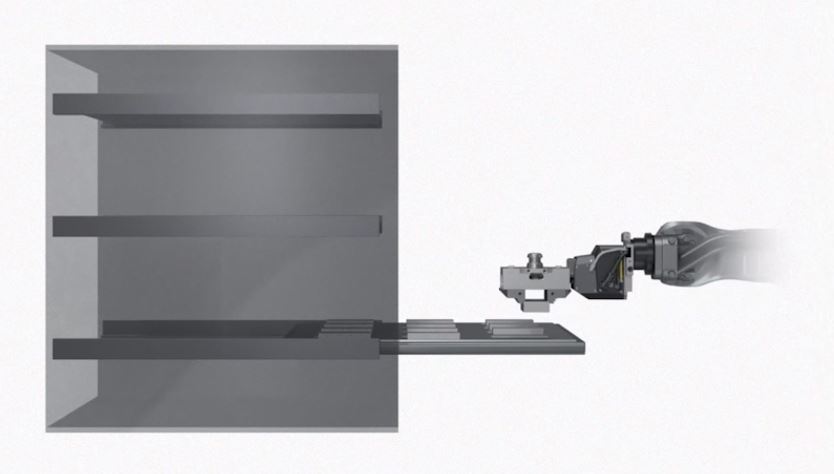
クランピングモジュールをロボットに取り付けることで、ロボットハンドのようにバイスでワークをピックアップし加工機内へ搬送し、バイスごとクランピング装置に設置します。
作業工程
STEP
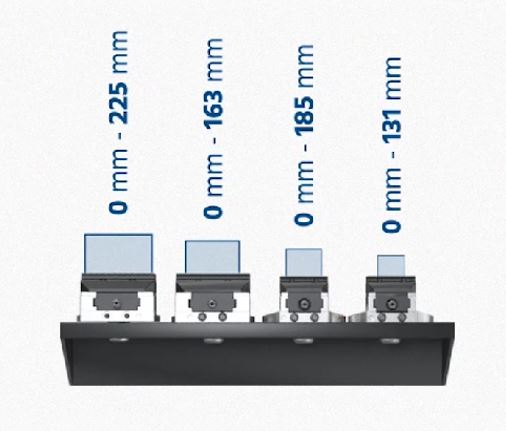
いくつかのバイスの中からワークに適切なサイズのバイスをロボットがピックアップ
STEP
ワーク置き場からワークをクランプ
STEP
加工機内のゼロクランピングシステムVERO-Sにワークをバイスごと設置
クランプされた面以外の5面を加工
クランプされた面以外の5面を加工

STEP
5面加工が終わるとワークをピックアップし、6面ステーションに用意しておいたセカンドバイスにワークを受け渡し

STEP
再度加工機内のゼロクランピングシステムにワークをバイスごと設置
残りの1面を加工
残りの1面を加工

STEP
最終加工が終わったワークを取り出し、ワーク置き場に搬送
特長
- ・1度の段取り替えで多品種ワークの加工が可能
・1台のロボットでワークのダイレクト搬送とバリ取りや研磨などの二次作業も行うことが可能
・作業時間の効率化
・ワークの加工中に別のバイスにて別のワークを事前にワーククランプしておくことにより、
更なる段取り時間の短縮が可能
・低コストで機械の稼働率を向上させ最も経済的なワーク加工を実現
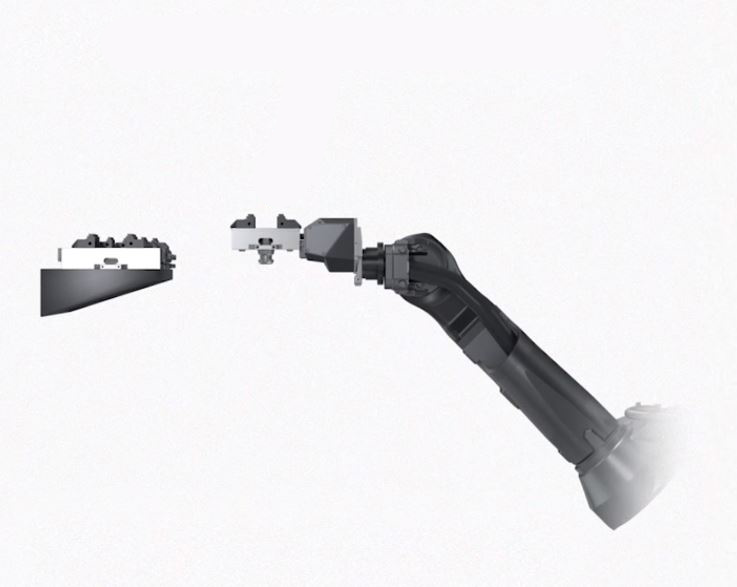
動画
R-C2の導入で、センタリングバイスがグリップモジュールに